Centro Barbecue 6500 Safe use Specifications Page 15
- Page / 42
- Table of contents
- BOOKMARKS
- Safety Reference Manual 1
- Important User Information 2
- Summary of Changes 3
- New and Updated 3
- Information 3
- Table of Contents 5
- About This Publication 7
- Who Should Use This Manual 7
- Terminology 7
- Additional Resources 8
- Safety Concept 9
- Stop Category 0 Definition 10
- PFD and PFH Definitions 11
- PFD and PFH Data 11
- Chapter 1 Safety Concept 12
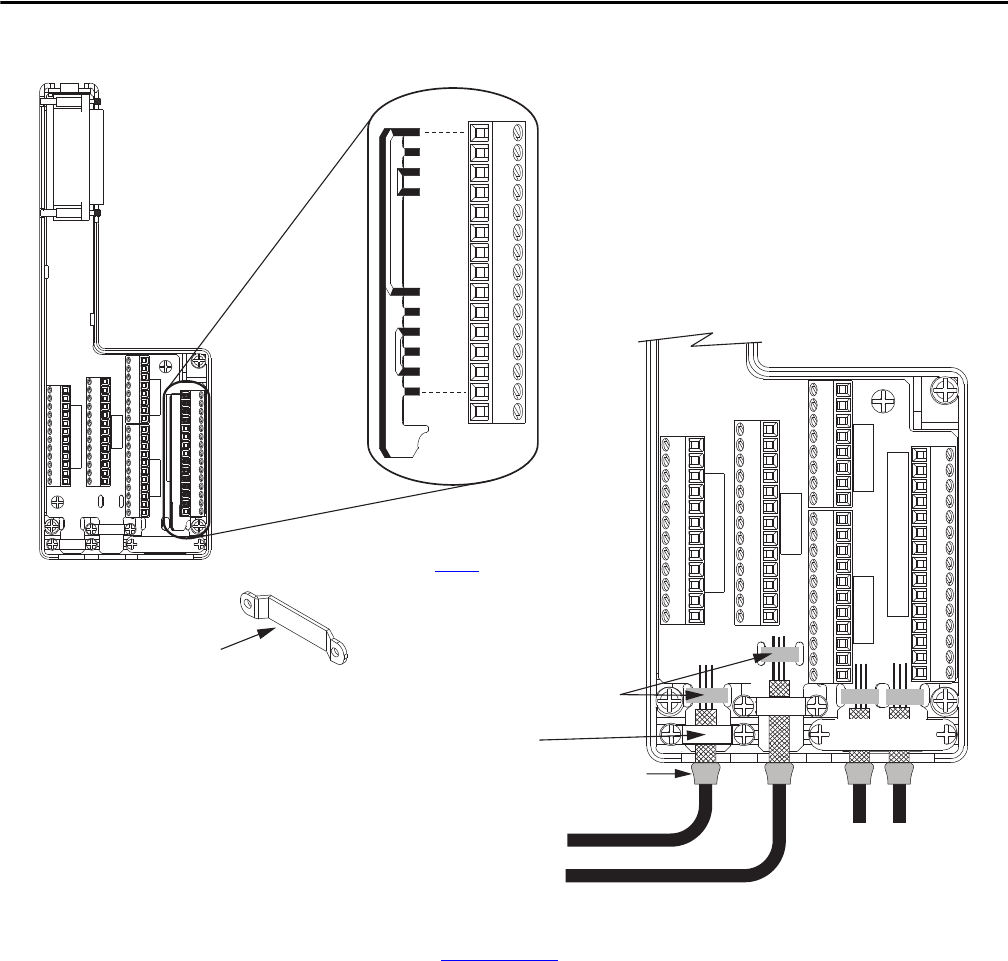
- Installation and Wiring 13
- Power Supply Requirements 14
- Wiring the Safety 14
- Connections 14
- AUX FEEDBACK 15
- S0&S1 W/S0 DISABLED 15
- Terminal Connections 18
- Safe Torque-off I/O Signals 19
- Figure 6 - Discrepancy Time 20
- Figure 7 - Reset Behavior 21
- IMPORTANT 22
- Reset Input (Reset_In) 23
- Safe Stop Output (SS_Out) 23
- Safe Stop Reset 25
- Safe Stop Wiring Example 26
- Multi-axis Cascaded Systems 27
- Safe Stop Wiring Examples 28
- Figure 17 30
- Chapter 5 33
- Introduction 33
- Nonrecoverable Faults 33
- Fault Recovery 33
- Input and Output Faults 34
- Fault Codes and Descriptions 34
- Status Attributes 35
- Guard Fault Attributes 36
- Specifications 37
- Certifications 38
- Rockwell Automation Support 42
- Documentation Feedback 42
Related products and manuals for Barbecues & grills Centro Barbecue 6500 Safe use

 (68 pages)
(68 pages) (24 pages)
(24 pages)© 2020, manymanuals.com. All rights reserved. | 0.339 s |
 Manymanuals.com
Manymanuals.com
 Manymanuals.de
Manymanuals.de
 Manymanuals.fr
Manymanuals.fr
 Manymanuals.it
Manymanuals.it
 Manymanuals.pl
Manymanuals.pl
 Manymanuals.cz
Manymanuals.cz
 Manymanuals.es
Manymanuals.es
 Manymanuals-pt.com
Manymanuals-pt.com
Comments to this Manuals